Comparação da Análise de Sistemas de Segunda Ordem
Prof. Henrique Amorim — CE2
Energia Cinética
0,000 J
Energia Potencial
0,000 J
Energia Total
0,000 J
Análise por Transformada de Laplace
A EDO homogênea de segunda ordem que rege o sistema é:
$$m\ddot{x}(t) + c\dot{x}(t) + kx(t) = 0$$As condições iniciais (C.I.) estabelecidas são:
- Posição inicial: $x(0) = x_0$
- Velocidade inicial: $\dot{x}(0) = v_0$
1. Aplicando a Transformada de Laplace na EDO
Utilizando a propriedade da transformada da derivada, mapeamos o comportamento temporal para o domínio da frequência complexa $s$:
- $\mathcal{L}\{x(t)\} = X(s)$
- $\mathcal{L}\{\dot{x}(t)\} = sX(s) - x(0) = sX(s) - x_0$
- $\mathcal{L}\{\ddot{x}(t)\} = s^2X(s) - sx(0) - \dot{x}(0) = s^2X(s) - sx_0 - v_0$
Substituindo esses termos diretamente na EDO original:
$$m\left(s^2X(s) - sx_0 - v_0\right) + c\left(sX(s) - x_0\right) + kX(s) = 0$$2. Isolando $X(s)$ no Domínio da Frequência
Expandindo os termos para agrupar e isolar a função algébrica $X(s)$:
$$ms^2X(s) - msx_0 - mv_0 + csX(s) - cx_0 + kX(s) = 0$$Agrupando todos os componentes multiplicados por $X(s)$ e passando as condições iniciais para o segundo membro da igualdade:
$$X(s)\left(ms^2 + cs + k\right) - x_0(ms + c) - mv_0 = 0$$ $$X(s)\left(ms^2 + cs + k\right) = x_0(ms + c) + mv_0$$Isolando $X(s)$:
$$X(s) = \frac{x_0(ms + c) + mv_0}{ms^2 + cs + k}$$Para simplificar a manipulação algébrica e alcançar a forma canônica, dividimos o numerador e o denominador pela massa $m$:
$$X(s) = \frac{x_0\!\left(s + \dfrac{c}{m}\right) + v_0}{s^2 + \dfrac{c}{m}\,s + \dfrac{k}{m}}$$3. Análise dos Polos do Sistema
Para entender como o sistema se comporta ao longo do tempo, precisamos encontrar as raízes do denominador de $X(s)$, que formam a equação característica do sistema. Igualando o denominador a zero, temos:
$$s^2 + \frac{c}{m}\,s + \frac{k}{m} = 0$$3.1 Encontrando os Coeficientes para Bhaskara
Esta é uma equação do segundo grau no formato genérico $as^2 + bs + c_{const} = 0$. Comparando termo a termo, identificamos os coeficientes:
- $a = 1$
- $b = \dfrac{c}{m}$ (onde $c$ é o amortecimento mecânico)
- $c_{const} = \dfrac{k}{m}$ (onde $k$ é a rigidez da mola)
3.2 Aplicando a Fórmula de Bhaskara Modificada
Como o coeficiente $a = 1$, podemos utilizar a forma simplificada de Bhaskara para encontrar os polos $p_1$ e $p_2$:
$$p_{1,2} = -\frac{b}{2} \pm \sqrt{\left(\frac{b}{2}\right)^2 - c_{const}}$$Substituindo os nossos parâmetros físicos mecânicos nesta equação:
$$p_{1,2} = -\dfrac{\,c/m\,}{2} \pm \sqrt{\left(\dfrac{\,c/m\,}{2}\right)^2 - \dfrac{k}{m}}$$ $$p_{1,2} = -\dfrac{c}{2m} \pm \sqrt{\left(\dfrac{c}{2m}\right)^2 - \dfrac{k}{m}}$$3.3 Definindo os Parâmetros Universais ($\alpha$ e $\omega_0$)
Para generalizar a equação e deixá-la independente se estamos falando de um sistema mecânico ou de um circuito elétrico, definimos os termos da equação de Bhaskara com duas grandezas fundamentais:
- Frequência de Neper ($\alpha$): Corresponde ao termo fora da raiz. Representa o fator de amortecimento absoluto do sistema. $$\alpha = \frac{b}{2} \implies \alpha = \frac{c}{2m}$$
- Frequência Angular de Ressonância ($\omega_0$): Também chamada de frequência natural não amortecida ($\omega_n$). Corresponde à raiz do termo constante. $$\omega_0^2 = c_{const} \implies \omega_0 = \sqrt{\frac{k}{m}}$$
Substituindo $\alpha$ e $\omega_0$ de volta na equação dos polos, chegamos à forma canônica e universal:
$$p_{1,2} = -\alpha \pm \sqrt{\alpha^2 - \omega_0^2}$$3.4 Classificação do Tipo de Resposta
O comportamento do sistema é inteiramente ditado pelo que acontece dentro da raiz quadrada, ou seja, pela relação entre o fator de amortecimento ($\alpha$) e a frequência de ressonância ($\omega_0$).
Temos três cenários físicos e matemáticos possíveis:
| Relação Matemática | Natureza dos Polos ($p_1$, $p_2$) | Tipo de Resposta Dinâmica |
|---|---|---|
| $\alpha^2 > \omega_0^2$ | Raízes reais distintas | Resposta superamortecida |
| $\alpha^2 < \omega_0^2$ | Raízes complexas conjugadas | Resposta subamortecida |
| $\alpha^2 = \omega_0^2$ | Raízes reais e iguais | Resposta criticamente amortecida |
Exemplos Numéricos por Regime
Dados do Sistema
- Massa: $m = 1$ kg
- Amortecimento: $c = 10$ N·s/m
- Rigidez da mola: $k = 16$ N/m
- Posição inicial: $x_0 = 500$ mm
- Velocidade inicial: $v_0 = 0$ m/s
Passo 1: Cálculo dos Parâmetros Fundamentais
A partir da equação característica normalizada pela massa ($s^2 + bs + c_{const} = 0$), extraímos os coeficientes:
- $b$ (Coeficiente de $s$): $$b = \frac{c}{m} = \frac{10}{1} = 10$$
- $c_{const}$ (Termo independente): $$c_{const} = \frac{k}{m} = \frac{16}{1} = 16$$
Convertendo para as grandezas dinâmicas universais:
- Frequência de Neper ($\alpha$): $$\alpha = \frac{b}{2} = \frac{10}{2} = 5 \text{ Np/s}$$
- $\alpha^2$: $$\alpha^2 = 5^2 = 25$$
- Frequência Angular de Ressonância quadrada ($\omega_0^2$): $$\omega_0^2 = c_{const} = 16$$
- $\omega_0$: $$\omega_0 = \sqrt{16} = 4 \text{ rad/s}$$
Classificação do Sistema: Como $\alpha^2 > \omega_0^2$ ($25 > 16$), o sistema é Superamortecido. Ele possui forte dissipação de energia e não apresentará oscilações.
Passo 2: Cálculo dos Polos ($p_1, p_2$)
Aplicamos a fórmula de Bhaskara adaptada ($p_{1,2} = -\alpha \pm \sqrt{\alpha^2 - \omega_0^2}$) para encontrar os polos da equação característica:
$$p_{1,2} = -5 \pm \sqrt{25 - 16}$$ $$p_{1,2} = -5 \pm \sqrt{9}$$ $$p_{1,2} = -5 \pm 3$$Dessa forma, obtemos dois polos reais, negativos e distintos:
- Polo 1: $p_1 = -5 + 3 = -2$
- Polo 2: $p_2 = -5 - 3 = -8$
Passo 3: Montagem de $X(s)$
A expressão geral no domínio de Laplace, conforme deduzido anteriormente, é:
$$X(s) = \frac{x_0\left(s + \frac{c}{m}\right) + v_0}{s^2 + \frac{c}{m}s + \frac{k}{m}}$$Substituindo as condições iniciais ($x_0 = 500$, $v_0 = 0$) e os coeficientes ($b = 10$, $c_{const} = 16$):
$$X(s) = \frac{500(s + 10) + 0}{s^2 + 10s + 16}$$Distribuindo o numerador:
$$X(s) = \frac{500s + 5000}{s^2 + 10s + 16}$$Fatorando o denominador através dos polos encontrados $(s - p_1)(s - p_2)$:
$$X(s) = \frac{500s + 5000}{(s-(-2))\,(s-(-8))}$$ $$X(s) = \frac{500s + 5000}{(s+2)\,(s+8)}$$Passo 4: Expansão em Frações Parciais
Para aplicar a transformada inversa, separamos a função em duas frações mais simples:
$$X(s) = \frac{500s + 5000}{(s+2)(s+8)} = \frac{A}{s+2} + \frac{B}{s+8}$$Utilizando o método dos resíduos de Heaviside para encontrar as constantes $A$ e $B$:
Cálculo de $A$ — avaliamos no polo $s = -2$, excluindo o fator $(s+2)$ do denominador:
$$A = \left.\frac{500s + 5000}{s + 8}\right|_{s=-2} = \frac{500(-2)+5000}{-2+8} = \frac{4000}{6} = \frac{2000}{3}$$Cálculo de $B$ — avaliamos no polo $s = -8$, excluindo o fator $(s+8)$ do denominador:
$$B = \left.\frac{500s + 5000}{s + 2}\right|_{s=-8} = \frac{500(-8)+5000}{-8+2} = \frac{1000}{-6} = -\frac{500}{3}$$Substituindo $A$ e $B$ na expressão:
$$X(s) = \frac{\dfrac{2000}{3}}{s+2} - \frac{\dfrac{500}{3}}{s+8}$$Passo 5: Transformada Inversa e Equação Horária
Com as frações na forma $\dfrac{K}{s+p}$, aplicamos a transformada inversa tabelada $\left(\mathcal{L}^{-1}\!\left\{\dfrac{K}{s+p}\right\} = K\,e^{\,-pt}\right)$ termo a termo e chegamos à equação horária exata:
$$\boxed{x(t) = \frac{2000}{3}\,e^{-2t} - \frac{500}{3}\,e^{-8t}}$$Interpretação do Resultado
No domínio de Laplace, a variável complexa $s$ é definida como $s = \sigma + j\omega$, em que o eixo real ($\sigma$) governa o crescimento ou decaimento exponencial — medido em Np/s — e o eixo imaginário ($j\omega$) governa a componente oscilatória — medido em rad/s. No sistema superamortecido estudado, a ausência de oscilação implica que os polos possuem parte imaginária nula e residem inteiramente no eixo real; sua unidade é, portanto, puramente Np/s.
1. Distinção Conceitual: $\alpha$ (Causa) versus Polos (Efeito)
- Frequência de Neper ($\alpha$): Trata-se de uma propriedade intrínseca e global do sistema mecânico, definida como $\alpha = \dfrac{c}{2m}$. No exemplo em estudo, $\alpha = 5$ Np/s. Este parâmetro representa a capacidade média de dissipação de energia do amortecedor em condições ideais.
- Polos $p_1$ e $p_2$: Representam os modos efetivos de movimento pelos quais o sistema dissipa essa energia. Eles não são arbitrários — a fórmula de Bhaskara evidencia que $\alpha$ é, geometricamente, o ponto médio exato entre os dois polos: $$p_{1,2} = -\alpha \pm \sqrt{\alpha^2 - \omega_0^2}$$ Com $\alpha = 5$, a dinâmica do sistema distribui a dissipação em dois extremos complementares: um modo lento ($p_1 = -5 + 3 = -2$ Np/s) e um modo rápido ($p_2 = -5 - 3 = -8$ Np/s).
2. Interpretação Física: A Superposição das Exponenciais
Ao se liberar a massa da posição inicial $x_0 = 500$ mm, o deslocamento resultante é a superposição de duas contribuições exponenciais independentes, cada qual associada a um polo:
- Polo rápido ($p_2 = -8$ Np/s): A exponencial $e^{-8t}$ decai velozmente. Fisicamente, corresponde à fase inicial do movimento: a mola encontra-se extremamente distendida e exerce força elevada, produzindo um deslocamento inicial vigoroso em direção à posição de equilíbrio. Esta componente é praticamente nula após aproximadamente $0{,}5$ s.
- Polo lento ($p_1 = -2$ Np/s): A exponencial $e^{-2t}$ decai vagarosamente e domina a fase final do movimento. À medida que a massa se aproxima do equilíbrio, a força restauradora da mola diminui progressivamente, tornando-se insuficiente para vencer a resistência viscosa do amortecedor. A massa converge assintoticamente para o repouso.
A consistência do resultado pode ser verificada imediatamente: no instante $t = 0$, ambas as exponenciais valem 1, de modo que a equação horária retorna exatamente a posição inicial:
$$x(0) = \frac{2000}{3} \cdot 1 - \frac{500}{3} \cdot 1 = \frac{2000 - 500}{3} = \frac{1500}{3} = 500 \text{ mm} = x_0 \checkmark$$Confirmada a condição inicial, a resposta é inteiramente caracterizada por um decaimento exponencial duplo — sem qualquer componente sinusoidal — o que é a assinatura inequívoca do regime superamortecido.
O Conceito de Polo Dominante
Na teoria de controle, denomina-se polo dominante aquele cuja parte real possui menor módulo — neste caso, $p_1 = -2$ Np/s. O polo rápido ($p_2 = -8$ Np/s) torna-se desprezível em uma fração do tempo total de resposta; portanto, é o polo dominante que determina o tempo de acomodação do sistema. Em outras palavras, o sistema nunca estabilizará mais rapidamente do que sua exponencial mais lenta.
Dados do Sistema
- Massa: $m = 1$ kg
- Amortecimento: $c = 2$ N·s/m
- Rigidez da mola: $k = 65$ N/m
- Posição inicial: $x_0 = 500$ mm
- Velocidade inicial: $v_0 = 0$ m/s
Passo 1: Cálculo dos Parâmetros Fundamentais
A partir da equação característica normalizada pela massa ($s^2 + bs + c_{const} = 0$), extraímos os coeficientes:
- $b$ (Coeficiente de $s$): $$b = \frac{c}{m} = \frac{2}{1} = 2$$
- $c_{const}$ (Termo independente): $$c_{const} = \frac{k}{m} = \frac{65}{1} = 65$$
Convertendo para as grandezas dinâmicas universais:
- Frequência de Neper ($\alpha$): $$\alpha = \frac{b}{2} = \frac{2}{2} = 1 \text{ Np/s}$$
- $\alpha^2$: $$\alpha^2 = 1^2 = 1$$
- Frequência Angular de Ressonância quadrada ($\omega_0^2$): $$\omega_0^2 = c_{const} = 65$$
- $\omega_0$: $$\omega_0 = \sqrt{65} \approx 8{,}062 \text{ rad/s}$$
Classificação do Sistema: Como $\alpha^2 < \omega_0^2$ ($1 < 65$), o sistema é Subamortecido. O discriminante de Bhaskara é negativo, o que implica polos complexos conjugados e, consequentemente, uma resposta oscilatória amortecida.
Passo 2: Cálculo dos Polos ($p_1, p_2$)
Aplicamos a fórmula dos polos $p_{1,2} = -\alpha \pm \sqrt{\alpha^2 - \omega_0^2}$. Com o discriminante negativo, introduzimos a frequência natural amortecida $\omega_d$, definida como:
$$\omega_d = \sqrt{\omega_0^2 - \alpha^2} = \sqrt{65 - 1} = \sqrt{64} = 8 \text{ rad/s}$$Isso permite reescrever a fórmula na forma complexa canônica $p_{1,2} = -\alpha \pm j\omega_d$:
$$p_{1,2} = -1 \pm j8$$Obtemos um par de polos complexos conjugados com parte real estritamente negativa:
- Polo 1: $p_1 = -1 + j8$
- Polo 2: $p_2 = -1 - j8$
Passo 3: Montagem de $X(s)$
A expressão geral no domínio de Laplace é:
$$X(s) = \frac{x_0\left(s + \frac{c}{m}\right) + v_0}{s^2 + \frac{c}{m}s + \frac{k}{m}}$$Substituindo as condições iniciais ($x_0 = 500$, $v_0 = 0$) e os coeficientes ($b = 2$, $c_{const} = 65$):
$$X(s) = \frac{500(s + 2) + 0}{s^2 + 2s + 65} = \frac{500s + 1000}{s^2 + 2s + 65}$$Fatorando o denominador pelos polos complexos encontrados:
$$X(s) = \frac{500s + 1000}{(s - (-1 + j8))\,(s - (-1 - j8))} = \frac{500s + 1000}{(s + 1 - j8)(s + 1 + j8)}$$Passo 4: Expansão em Frações Parciais
Etapa 1 — Frações Parciais e Cálculo dos Resíduos ($K_1$ e $K_2$):
Expressamos $X(s)$ na forma fatorada e estabelecemos a decomposição:
$$X(s) = \frac{500s + 1000}{(s - p_1)(s - p_2)} = \frac{K_1}{s - p_1} + \frac{K_2}{s - p_2}$$Pelo método dos resíduos de Heaviside:
Cálculo de $K_1$ — avaliamos no polo $s = p_1 = -1 + j8$:
$$K_1 = \left.\frac{500s + 1000}{s - p_2}\right|_{s\,=\,p_1} = \frac{500(-1 + j8) + 1000}{(-1 + j8) - (-1 - j8)}$$ $$K_1 = \frac{-500 + j4000 + 1000}{j16} = \frac{500 + j4000}{j16}$$Dividindo as partes real e imaginária pelo denominador $j16$ (usando $\tfrac{1}{j} = -j$):
$$K_1 = \frac{500}{j16} + \frac{j4000}{j16} = -j\frac{500}{16} + 250 = \mathbf{250 - j31{,}25}$$Cálculo de $K_2$: como todos os coeficientes da EDO original são reais, $K_2$ é obrigatoriamente o conjugado complexo de $K_1$:
$$K_2 = \overline{K_1} = \mathbf{250 + j31{,}25}$$Conversão para a Forma Polar ($M e^{j\theta}$):
Módulo ($M$):
$$M = \sqrt{250^2 + (31{,}25)^2} = \sqrt{62500 + 976{,}5625} = \sqrt{63476{,}56} \cong \mathbf{251{,}945}$$Fase ($\theta$) — como a parte real de $K_1$ é positiva (4.º quadrante), nenhum ajuste é necessário:
$$\theta = \arctan\!\left(\frac{-31{,}25}{250}\right) = \arctan(-0{,}125) \cong \mathbf{-7{,}125^\circ}$$Portanto, os resíduos em forma polar são:
$$K_1 = 251{,}945\,e^{-j7{,}125^\circ} \qquad K_2 = 251{,}945\,e^{+j7{,}125^\circ}$$Etapa 2 — Montagem de $X(s)$ e Transformada Inversa:
Substituindo os resíduos polares e os polos na expansão e aplicando $\mathcal{L}^{-1}\!\left\{\dfrac{K}{s-p}\right\} = K\,e^{\,pt}$ termo a termo:
$$X(s) = \frac{251{,}945\,e^{-j7{,}125^\circ}}{s - (-1 + j8)} + \frac{251{,}945\,e^{+j7{,}125^\circ}}{s - (-1 - j8)}$$ $$x(t) = 251{,}945\,e^{-j7{,}125^\circ}\cdot e^{(-1+j8)t} + 251{,}945\,e^{+j7{,}125^\circ}\cdot e^{(-1-j8)t}$$Etapa 3 — Manipulação Algébrica e Identidade de Euler:
Separamos o decaimento real da oscilação imaginária e colocamos os termos comuns ($251{,}945$ e $e^{-t}$) em evidência:
$$x(t) = 251{,}945\cdot e^{-t}\left(e^{-j7{,}125^\circ}\cdot e^{j8t} + e^{+j7{,}125^\circ}\cdot e^{-j8t}\right)$$Somando os expoentes de mesma base:
$$x(t) = 251{,}945\cdot e^{-t}\left(e^{\,j(8t\,-\,7{,}125^\circ)} + e^{-j(8t\,-\,7{,}125^\circ)}\right)$$Aplicando a Identidade de Euler $\left(e^{jx} + e^{-jx} = 2\cos x\right)$:
$$x(t) = 251{,}945\cdot e^{-t}\cdot 2\cos\!\left(8t - 7{,}125^\circ\right)$$Passo 5: Transformada Inversa e Equação Horária
Multiplicando o módulo pelo fator 2, chegamos à equação horária final da posição da massa:
$$\boxed{x(t) = 503{,}890\cdot e^{-t}\cdot\cos\!\left(8t - 7{,}125^\circ\right)}$$Interpretação do Resultado
No domínio de Laplace, polos complexos conjugados com parte real estritamente negativa constituem a assinatura matemática inequívoca do regime subamortecido. Ao contrário do caso superamortecido — em que os polos residem inteiramente no eixo real — aqui cada polo possui a forma $p = -\alpha \pm j\omega_d$: a parte real $\sigma = -\alpha$ governa a taxa de decaimento exponencial (em Np/s) e a parte imaginária $\omega_d$ governa a frequência de oscilação amortecida (em rad/s). A presença desta componente imaginária é o que confere ao sistema seu comportamento oscilatório.
1. Os Três Ingredientes da Resposta Subamortecida
A equação horária $x(t) = 503{,}890\cdot e^{-t}\cdot\cos(8t - 7{,}125^\circ)$ é composta por três fatores com significados físicos distintos:
- Amplitude inicial ($503{,}890$ mm): Ligeiramente superior a $x_0 = 500$ mm. Esta diferença é ditada pela fase $\phi = -7{,}125^\circ$, que introduz uma leve assimetria em $t = 0$. A consistência da solução pode ser verificada diretamente: $$x(0) = 503{,}890\cdot\cos(-7{,}125^\circ) \approx 503{,}890 \times 0{,}992 \approx 500 \text{ mm} = x_0\;\checkmark$$
- Envoltória de decaimento ($e^{-\alpha t} = e^{-t}$): Controlada por $\alpha = 1$ Np/s. Esta componente delimita a amplitude máxima da oscilação ao longo do tempo. Em comparação ao caso superamortecido ($\alpha = 5$ Np/s), o decaimento aqui é muito mais lento, permitindo que o sistema complete diversas oscilações antes de atingir o repouso.
- Oscilação amortecida ($\cos(\omega_d\, t + \phi)$): Controlada por $\omega_d = 8$ rad/s, que é a frequência à qual a massa genuinamente oscila. Note que $\omega_d = 8$ rad/s é ligeiramente inferior à frequência natural não amortecida $\omega_0 \approx 8{,}062$ rad/s — a diferença é mínima pois o amortecimento é muito fraco ($\zeta = \frac{\alpha}{\omega_0} \approx 0{,}124$).
2. A Origem da Fase $\phi = -7{,}125^\circ$ e Verificação das Condições Iniciais
O ângulo de fase não é arbitrário — ele emerge diretamente da relação entre as condições iniciais e os parâmetros dinâmicos do sistema. Com $v_0 = 0$, demonstra-se que:
$$\phi = -\arctan\!\left(\frac{\alpha}{\omega_d}\right) = -\arctan\!\left(\frac{1}{8}\right) = -\arctan(0{,}125) \approx -7{,}125^\circ$$A fase é, portanto, uma medida direta de quão dominante é o amortecimento frente à oscilação: quanto menor $\alpha/\omega_d$, mais a resposta se aproxima de um cosseno puro sem desvio de fase. A consistência da solução com ambas as condições iniciais ($x(0) \approx 500$ mm e $\dot{x}(0) = 0$) confirma a validade do resultado.
Tempo de Acomodação e Papel de $\alpha$
No regime subamortecido, como ambos os polos partilham a mesma parte real $\sigma = -\alpha = -1$ Np/s, não existe um polo dominante no sentido estrito — o tempo de acomodação é ditado diretamente por $\alpha$. Pelo critério das cinco constantes de tempo, o sistema estabiliza-se em aproximadamente $5/\alpha = 5$ s. Quanto menor $\alpha$ em relação a $\omega_0$, maior o número de oscilações visíveis antes do repouso e mais pronunciado o caráter ressonate do sistema.
Dados do Sistema
- Massa: $m = 1$ kg
- Amortecimento: $c = 6$ N·s/m
- Rigidez da mola: $k = 9$ N/m
- Posição inicial: $x_0 = 500$ mm
- Velocidade inicial: $v_0 = 0$ m/s
Passo 1: Cálculo dos Parâmetros Fundamentais
A partir da equação característica normalizada pela massa ($s^2 + bs + c_{const} = 0$), extraímos os coeficientes:
- $b$ (Coeficiente de $s$): $$b = \frac{c}{m} = \frac{6}{1} = 6$$
- $c_{const}$ (Termo independente): $$c_{const} = \frac{k}{m} = \frac{9}{1} = 9$$
Convertendo para as grandezas dinâmicas universais:
- Frequência de Neper ($\alpha$): $$\alpha = \frac{b}{2} = \frac{6}{2} = 3 \text{ Np/s}$$
- $\alpha^2$: $$\alpha^2 = 3^2 = 9$$
- Frequência Angular de Ressonância quadrada ($\omega_0^2$): $$\omega_0^2 = c_{const} = 9$$
- $\omega_0$: $$\omega_0 = \sqrt{9} = 3 \text{ rad/s}$$
Classificação do Sistema: Como $\alpha^2 = \omega_0^2$ ($9 = 9$), o sistema é Criticamente Amortecido. Este é o limiar exato entre os regimes oscilatório e não-oscilatório — o sistema retorna ao equilíbrio no menor tempo possível sem oscilar.
Passo 2: Cálculo do Polo Duplo ($p$)
Aplicamos a fórmula dos polos $p_{1,2} = -\alpha \pm \sqrt{\alpha^2 - \omega_0^2}$. Como $\alpha^2 = \omega_0^2$, o discriminante é exatamente zero:
$$p_{1,2} = -3 \pm \sqrt{9 - 9} = -3 \pm 0$$Resultado: um único polo real com multiplicidade 2 (polo duplo):
$$p = -3 \text{ Np/s}$$Passo 3: Montagem de $X(s)$
A expressão geral no domínio de Laplace é:
$$X(s) = \frac{x_0\left(s + \frac{c}{m}\right) + v_0}{s^2 + \frac{c}{m}\,s + \frac{k}{m}}$$Substituindo as condições iniciais ($x_0 = 500$, $v_0 = 0$) e os coeficientes ($b = 6$, $c_{const} = 9$):
$$X(s) = \frac{500(s + 6) + 0}{s^2 + 6s + 9}$$Distribuindo o numerador:
$$X(s) = \frac{500s + 3000}{s^2 + 6s + 9}$$Fatorando o denominador pelo polo duplo $(s - p)^2 = (s + 3)^2$:
$$X(s) = \frac{500s + 3000}{(s + 3)^2}$$Passo 4: Expansão em Frações Parciais
Para um polo duplo em $p = -3$, a decomposição em frações parciais assume a seguinte forma, com dois termos associados às potências crescentes do fator $(s - p)$:
$$X(s) = \frac{500s + 3000}{(s+3)^2} = \frac{A}{s+3} + \frac{B}{(s+3)^2}$$Cálculo de $B$ — resíduo de ordem 2. Multiplicamos ambos os lados por $(s+3)^2$ e avaliamos em $s = -3$:
$$B = \left.\left[(s+3)^2 \cdot X(s)\right]\right|_{s=-3} = \left.(500s + 3000)\right|_{s=-3}$$ $$B = 500(-3) + 3000 = -1500 + 3000 = 1500$$Cálculo de $A$ — resíduo de ordem 1. Após multiplicar por $(s+3)^2$, derivamos em relação a $s$ e avaliamos em $s = -3$:
$$A = \left.\frac{d}{ds}\left[(s+3)^2 \cdot X(s)\right]\right|_{s=-3} = \left.\frac{d}{ds}(500s + 3000)\right|_{s=-3} = 500$$Substituindo $A$ e $B$ na expressão:
$$X(s) = \frac{500}{s+3} + \frac{1500}{(s+3)^2}$$Passo 5: Transformada Inversa e Equação Horária
Aplicamos a transformada inversa de Laplace termo a termo, utilizando os pares tabelados:
- $\mathcal{L}^{-1}\!\left\{\dfrac{K}{s+a}\right\} = K\,e^{-at}$
- $\mathcal{L}^{-1}\!\left\{\dfrac{K}{(s+a)^2}\right\} = K\,t\,e^{-at}$
Aplicando a cada parcela:
$$\mathcal{L}^{-1}\!\left\{\frac{500}{s+3}\right\} = 500\,e^{-3t}$$ $$\mathcal{L}^{-1}\!\left\{\frac{1500}{(s+3)^2}\right\} = 1500\,t\,e^{-3t}$$Somando as contribuições e colocando a exponencial em evidência, chegamos à equação horária:
$$\boxed{x(t) = (500 + 1500\,t)\,e^{-3t}}$$Interpretação do Resultado
No domínio de Laplace, o regime criticamente amortecido corresponde ao caso limite em que o discriminante de Bhaskara se anula — ou seja, $\alpha^2 - \omega_0^2 = 0$. Matematicamente, isso implica a coalescência dos dois polos em um único polo duplo real, $p = -\alpha$. A consequência direta no domínio do tempo é uma resposta que combina uma exponencial pura com uma exponencial multiplicada por $t$, o que a distingue fundamentalmente dos outros dois regimes.
1. Verificação das Condições Iniciais
A consistência da solução pode ser verificada avaliando a equação horária e sua derivada em $t = 0$:
- Posição inicial: $$x(0) = (500 + 1500 \cdot 0)\,e^{0} = 500 \text{ mm} = x_0\;\checkmark$$
- Velocidade inicial — derivando $x(t) = (500 + 1500t)\,e^{-3t}$: $$\dot{x}(t) = 1500\,e^{-3t} + (500 + 1500t)\,(-3)\,e^{-3t} = (1500 - 1500 - 4500t)\,e^{-3t} = -4500t\,e^{-3t}$$ $$\dot{x}(0) = 0 = v_0\;\checkmark$$
2. A Estrutura da Resposta: Dois Modos de Decaimento
A equação $x(t) = (500 + 1500\,t)\,e^{-3t}$ é a superposição de dois modos distintos, ambos governados pelo mesmo polo $p = -3$ Np/s:
- Modo constante — $500\,e^{-3t}$: Análogo ao modo de um sistema superamortecido com polo único. Representa a componente de decaimento puro, proporcional à posição inicial $x_0$.
- Modo rampa amortecida — $1500\,t\,e^{-3t}$: Exclusivo do regime criticamente amortecido. O fator $t$ faz com que esta componente inicialmente cresça com o tempo antes de ser dominada pelo decaimento exponencial. O pico desta componente ocorre em $t = 1/\alpha = 1/3$ s.
A combinação desses dois modos produz um retorno suave, monotônico e sem oscilações — porém mais rápido do que qualquer sistema superamortecido com os mesmos $m$ e $k$.
3. O Criticamente Amortecido como Fronteira Ótima
O regime criticamente amortecido representa o ponto ótimo de projeto para sistemas que devem retornar ao equilíbrio sem oscilar no menor tempo possível. A comparação entre os três regimes evidencia isso:
| Regime | Forma da resposta $x(t)$ | Tempo de acomodação (aprox.) |
|---|---|---|
| Superamortecido ($\alpha > \omega_0$) | $A\,e^{p_1 t} + B\,e^{p_2 t}$, dois polos reais | $\gt 5/|p_1|$ (dominado pelo polo mais lento) |
| Criticamente amortecido ($\alpha = \omega_0$) | $(A + Bt)\,e^{-\alpha t}$, polo duplo | $\approx 5/\alpha$ (mínimo sem oscilação) |
| Subamortecido ($\alpha < \omega_0$) | $M\,e^{-\alpha t}\cos(\omega_d t + \phi)$, polos complexos | $\approx 5/\alpha$ (mas com ultrapassagem) |
O sistema superamortecido, embora também sem oscilações, possui um polo mais lento que $-\alpha$ (pois $|p_1| < \alpha$), tornando-o mais lento que o criticamente amortecido. Já o subamortecido apresenta o mesmo tempo de envoltória, mas a presença de ultrapassagem (overshoot) pode ser indesejável em certas aplicações de controle e estrutural.
Ajuste os sliders e clique em "Atualizar" para calcular.
Energia do Indutor
0,0 μJ
Energia do Capacitor
500,0 μJ
Energia Inicial
500,0 μJ
Energia Dissipada
0,0 μJ
Análise por Transformada de Laplace
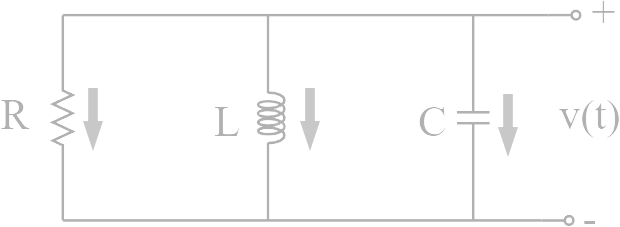
A EDO homogênea de segunda ordem que rege o circuito RLC paralelo (obtida através da LKC no nó e derivando em relação ao tempo) é:
$$\frac{d^2v(t)}{dt^2} + \frac{1}{RC}\frac{dv(t)}{dt} + \frac{1}{LC}v(t) = 0$$As condições iniciais (C.I.) de energia armazenada no instante $t = 0^+$ são definidas pelos componentes armazenadores:
- Tensão inicial no capacitor: $v(0) = V_0$
- Corrente inicial no indutor: $i_L(0) = I_0$
A Derivada Inicial ($\dot{v}(0)$)
Para resolver a EDO via Laplace, precisaremos da taxa de variação inicial da tensão. Avaliando a LKC ($i_R + i_L + i_C = 0$) no exato instante $t = 0^+$:
$$\frac{v(0)}{R} + i_L(0) + C\frac{dv(0)}{dt} = 0$$ $$\frac{V_0}{R} + I_0 + C\dot{v}(0) = 0$$ $$\dot{v}(0) = -\frac{V_0}{RC} - \frac{I_0}{C}$$1. Aplicando a Transformada de Laplace na EDO
Utilizando a propriedade da transformada da derivada e as condições iniciais deduzidas, mapeamos o sistema para o domínio complexo $s$:
- $\mathcal{L}\{v(t)\} = V(s)$
- $\mathcal{L}\{\dot{v}(t)\} = sV(s) - v(0) = sV(s) - V_0$
- $\mathcal{L}\{\ddot{v}(t)\} = s^2V(s) - sv(0) - \dot{v}(0) = s^2V(s) - sV_0 - \!\left(-\dfrac{V_0}{RC} - \dfrac{I_0}{C}\right)$
Substituindo esses três termos diretamente na EDO original:
$$\left[s^2V(s) - sV_0 + \frac{V_0}{RC} + \frac{I_0}{C}\right] + \frac{1}{RC}\left[sV(s) - V_0\right] + \frac{1}{LC}\left[V(s)\right] = 0$$2. Isolando $V(s)$ no Domínio da Frequência
Expandindo os colchetes para agrupar e isolar a função algébrica $V(s)$:
$$s^2V(s) - sV_0 + \frac{V_0}{RC} + \frac{I_0}{C} + \frac{s}{RC}V(s) - \frac{V_0}{RC} + \frac{1}{LC}V(s) = 0$$Observe que a parcela proveniente da derivada inicial $\left(+\dfrac{V_0}{RC}\right)$ cancela perfeitamente o termo gerado pela expansão de $\dfrac{1}{RC}\left[sV(s) - V_0\right]$ $\left(-\dfrac{V_0}{RC}\right)$. Agrupando os termos de $V(s)$ e passando as energias iniciais para o outro lado:
$$V(s)\!\left(s^2 + \frac{1}{RC}\,s + \frac{1}{LC}\right) - sV_0 + \frac{I_0}{C} = 0$$ $$V(s)\!\left(s^2 + \frac{1}{RC}\,s + \frac{1}{LC}\right) = sV_0 - \frac{I_0}{C}$$Isolando $V(s)$, alcançamos a forma canônica exata da resposta do circuito:
$$V(s) = \frac{sV_0 - \dfrac{I_0}{C}}{s^2 + \dfrac{1}{RC}\,s + \dfrac{1}{LC}}$$
1. Transformação do Circuito para o Domínio de Laplace
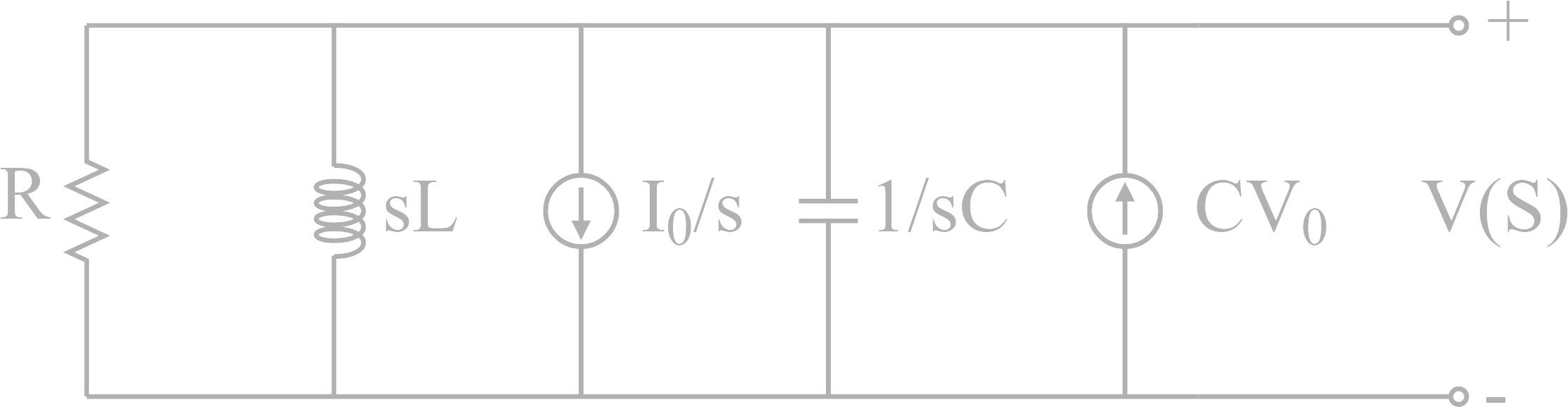
No domínio do tempo, o circuito RLC paralelo possui três elementos passivos conectados em paralelo. Para trabalhar no domínio de Laplace, cada componente é substituído pelo seu equivalente algébrico em $s$. Elementos armazenadores de energia com condições iniciais não nulas introduzem fontes de corrente independentes que representam essa energia no instante $t = 0^+$:
- Resistor $R$: Representado diretamente pela sua impedância $R$ (sem fontes adicionais, pois não armazena energia).
- Indutor $L$ com corrente inicial $I_0$: Representado pela impedância $sL$ em paralelo com uma fonte de corrente $\dfrac{I_0}{s}$, com corrente saindo do nó superior.
- Capacitor $C$ com tensão inicial $V_0$: Representado pela impedância $\dfrac{1}{sC}$ em paralelo com uma fonte de corrente $C\,V_0$, com corrente entrando no nó superior.
2. Determinação da Fonte de Corrente Equivalente $I(s)$
Pela LKC no nó superior, a corrente líquida injetada é a soma algébrica das duas fontes. Adotando como positivo o sentido entrante no nó:
- Capacitor injeta $+C\,V_0$ no nó superior.
- Indutor drena $-\dfrac{I_0}{s}$ do nó superior.
A fonte de corrente equivalente resultante é:
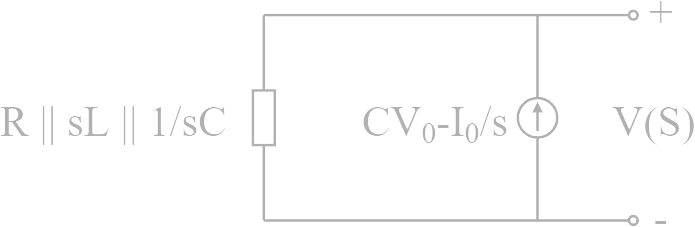
$$I(s) = C\,V_0 - \frac{I_0}{s}$$3. Cálculo da Impedância Equivalente $Z_{eq}(s)$
As três impedâncias ($R$, $sL$ e $\dfrac{1}{sC}$) estão em paralelo. Calculamos $Z_{eq}(s)$ combinando-as em etapas:
Etapa 3.1 — Associação $sL \parallel \dfrac{1}{sC}$
$$Z_{eq}(s) = R \parallel sL \parallel \frac{1}{sC}$$Iniciando com o paralelo entre indutor e capacitor:
$$sL \parallel \frac{1}{sC} = \frac{sL\cdot\dfrac{1}{sC}}{sL + \dfrac{1}{sC}} = \frac{\dfrac{L}{C}}{\dfrac{s^2LC+1}{sC}} = \frac{sL}{s^2LC+1}$$Etapa 3.2 — Associação $R \parallel \dfrac{sL}{s^2LC+1}$
Associando o resultado anterior com $R$:
$$Z_{eq}(s) = \frac{sL}{s^2LC+1} \parallel R = \frac{R \cdot \dfrac{sL}{s^2LC+1}}{R + \dfrac{sL}{s^2LC+1}} = \frac{sRL}{RLC\,s^2 + sL + R}$$Etapa 3.3 — Forma Canônica (divisão por $RLC$)
Dividindo numerador e denominador por $RLC$:
$$Z_{eq}(s) = \frac{s\,\dfrac{1}{C}}{s^2 + s\,\dfrac{1}{RC} + \dfrac{1}{LC}}$$4. Obtendo $V(s)$ pela Lei de Ohm no Domínio da Frequência
Com $Z_{eq}(s)$ e $I(s)$ determinados, a tensão no nó é obtida pela Lei de Ohm generalizada $V(s) = Z_{eq}(s)\cdot I(s)$:
$$V(s) = \left(\frac{s\,\dfrac{1}{C}}{s^2 + s\,\dfrac{1}{RC} + \dfrac{1}{LC}}\right)\cdot\left(C\,V_0 - \frac{I_0}{s}\right)$$Expandindo o produto no numerador:
$$V(s) = \frac{s\,\dfrac{1}{C}\cdot C\,V_0 \;-\; s\,\dfrac{1}{C}\cdot\dfrac{I_0}{s}}{s^2 + s\,\dfrac{1}{RC} + \dfrac{1}{LC}} = \frac{s\,V_0 - \dfrac{I_0}{C}}{s^2 + s\,\dfrac{1}{RC} + \dfrac{1}{LC}}$$Este resultado é idêntico ao obtido pelo método da EDO, confirmando a coerência entre os dois métodos de análise:
$$\boxed{V(s) = \frac{s\cdot V_0 - \dfrac{I_0}{C}}{s^2 + s\,\dfrac{1}{RC} + \dfrac{1}{LC}}}$$3. Análise dos Polos do Sistema
Para entender como a tensão vai decair ou oscilar, precisamos encontrar as raízes do denominador de $V(s)$, que formam a equação característica do sistema. Igualando o denominador a zero:
$$s^2 + \frac{1}{RC}\,s + \frac{1}{LC} = 0$$3.1 Encontrando os Coeficientes para Bhaskara
Esta é uma equação do segundo grau no formato genérico $as^2 + bs + c_{const} = 0$. Comparando termo a termo, identificamos os coeficientes:
- $a = 1$
- $b = \dfrac{1}{RC}$ (Termo de amortecimento — dissipação pelo resistor)
- $c_{const} = \dfrac{1}{LC}$ (Termo de oscilação — interação reativa entre indutor e capacitor)
3.2 Aplicando a Fórmula de Bhaskara Modificada
Como o coeficiente $a = 1$, podemos utilizar a forma simplificada de Bhaskara para encontrar os polos $p_1$ e $p_2$:
$$p_{1,2} = -\frac{b}{2} \pm \sqrt{\left(\frac{b}{2}\right)^2 - c_{const}}$$Substituindo os nossos parâmetros elétricos nesta equação:
$$p_{1,2} = -\dfrac{\frac{1}{RC}}{2} \pm \sqrt{\left(\dfrac{\frac{1}{RC}}{2}\right)^2 - \dfrac{1}{LC}}$$ $$p_{1,2} = -\dfrac{1}{2RC} \pm \sqrt{\left(\dfrac{1}{2RC}\right)^2 - \dfrac{1}{LC}}$$3.3 Definindo os Parâmetros Universais ($\alpha$ e $\omega_0$)
Para generalizar a equação e deixá-la independente do domínio físico (mecânico ou elétrico), encapsulamos os parâmetros elétricos nestas duas grandezas clássicas:
- Frequência de Neper ($\alpha$): O fator de amortecimento absoluto, controlado pelo resistor. $$\alpha = \frac{b}{2} \implies \alpha = \frac{1}{2RC}$$
- Frequência Angular de Ressonância ($\omega_0$): A frequência natural não amortecida, determinada pela combinação $LC$. $$\omega_0^2 = c_{const} \implies \omega_0 = \frac{1}{\sqrt{LC}}$$
Substituindo $\alpha$ e $\omega_0$ de volta na equação dos polos, chegamos à mesma forma canônica universal obtida no sistema mecânico:
$$p_{1,2} = -\alpha \pm \sqrt{\alpha^2 - \omega_0^2}$$3.4 Classificação do Tipo de Resposta
O comportamento da tensão $v(t)$ é inteiramente ditado pelo que acontece dentro da raiz quadrada, ou seja, pela relação entre a taxa de dissipação ($\alpha$) e a frequência natural ($\omega_0$).
Temos três cenários físicos e matemáticos possíveis:
| Relação Matemática | Natureza dos Polos ($p_1$, $p_2$) | Tipo de Resposta Dinâmica |
|---|---|---|
| $\alpha^2 > \omega_0^2$ | Raízes reais distintas | Resposta superamortecida |
| $\alpha^2 < \omega_0^2$ | Raízes complexas conjugadas | Resposta subamortecida |
| $\alpha^2 = \omega_0^2$ | Raízes reais e iguais | Resposta criticamente amortecida |
Exemplos Numéricos por Regime
Dados do Circuito
- Resistência: $R = 2\ \Omega$
- Indutância: $L = 625\ \mu\text{H}$
- Capacitância: $C = 25\ \mu\text{F}$
- Tensão inicial: $V_0 = 5\ \text{V}$
- Corrente inicial: $I_0 = 1\ \text{A}$
Passo 1: Cálculo dos Parâmetros Fundamentais
A partir da equação característica do circuito RLC paralelo ($s^2 + \frac{1}{RC}s + \frac{1}{LC} = 0$), identificamos os coeficientes:
- Coeficiente de $s$: $$\frac{1}{RC} = \frac{1}{2 \times 25 \times 10^{-6}} = 20\,000$$
- Termo independente: $$\frac{1}{LC} = \frac{1}{625 \times 10^{-6} \times 25 \times 10^{-6}} = \frac{1}{15{,}625 \times 10^{-9}} = 64\,000\,000$$
Convertendo para as grandezas dinâmicas universais:
- Frequência de Neper ($\alpha$): $$\alpha = \frac{1}{2RC} = \frac{1}{2 \times 2 \times 25 \times 10^{-6}} = 10\,000\ \text{Np/s}$$
- $\alpha^2$: $$\alpha^2 = (10\,000)^2 = 10^8$$
- Frequência Angular de Ressonância ($\omega_0$): $$\omega_0 = \frac{1}{\sqrt{LC}} = \frac{1}{\sqrt{625 \times 10^{-6} \times 25 \times 10^{-6}}} = \frac{1}{125 \times 10^{-6}} = 8\,000\ \text{rad/s}$$
- $\omega_0^2$: $$\omega_0^2 = (8\,000)^2 = 6{,}4 \times 10^7$$
- Coeficiente de amortecimento ($\zeta$): $$\zeta = \frac{\alpha}{\omega_0} = \frac{10\,000}{8\,000} = 1{,}25$$
Classificação do Sistema: Como $\alpha^2 > \omega_0^2$ ($10^8 > 6{,}4 \times 10^7$) e $\zeta = 1{,}25 > 1$, o circuito é Superamortecido. A dissipação pelo resistor é suficientemente intensa para impedir qualquer oscilação de tensão no nó.
Passo 2: Cálculo dos Polos ($p_1, p_2$)
Aplicamos a fórmula dos polos ($p_{1,2} = -\alpha \pm \sqrt{\alpha^2 - \omega_0^2}$):
$$\Delta = \alpha^2 - \omega_0^2 = 10^8 - 6{,}4 \times 10^7 = 3{,}6 \times 10^7$$ $$\sqrt{\Delta} = \sqrt{3{,}6 \times 10^7} = 6\,000$$ $$p_{1,2} = -10\,000 \pm 6\,000$$Obtemos dois polos reais, negativos e distintos:
- Polo 1: $p_1 = -10\,000 + 6\,000 = -4\,000\ \text{Np/s}$ (polo dominante — modo lento)
- Polo 2: $p_2 = -10\,000 - 6\,000 = -16\,000\ \text{Np/s}$ (polo rápido — modo transitório)
Passo 3: Montagem de $V(s)$
A expressão geral deduzida anteriormente é:
$$V(s) = \frac{s\,V_0 - \dfrac{I_0}{C}}{s^2 + \dfrac{1}{RC}\,s + \dfrac{1}{LC}}$$Calculamos primeiro a contribuição da corrente inicial no numerador:
$$\frac{I_0}{C} = \frac{1}{25 \times 10^{-6}} = 40\,000$$Substituindo $V_0 = 5$, $\dfrac{I_0}{C} = 40\,000$ e os coeficientes encontrados:
$$V(s) = \frac{5s - 40\,000}{s^2 + 20\,000\,s + 64\,000\,000}$$Fatorando o denominador pelos polos $(s - p_1)(s - p_2)$:
$$V(s) = \frac{5s - 40\,000}{(s + 4\,000)\,(s + 16\,000)}$$Passo 4: Expansão em Frações Parciais
Para aplicar a transformada inversa, decompomos em frações simples:
$$V(s) = \frac{5s - 40\,000}{(s+4000)(s+16000)} = \frac{A}{s+4000} + \frac{B}{s+16000}$$Pelo método dos resíduos de Heaviside:
Cálculo de $A$ — avaliado no polo $s = -4\,000$:
$$A = \left.\frac{5s - 40\,000}{s + 16\,000}\right|_{s=-4000} = \frac{5(-4000) - 40000}{-4000 + 16000} = \frac{-60\,000}{12\,000} = -5$$Cálculo de $B$ — avaliado no polo $s = -16\,000$:
$$B = \left.\frac{5s - 40\,000}{s + 4\,000}\right|_{s=-16000} = \frac{5(-16000) - 40000}{-16000 + 4000} = \frac{-120\,000}{-12\,000} = 10$$Substituindo $A = -5$ e $B = 10$:
$$V(s) = \frac{-5}{s+4\,000} + \frac{10}{s+16\,000}$$Passo 5: Transformada Inversa e Equação de $v(t)$
Aplicando $\mathcal{L}^{-1}\!\left\{\dfrac{K}{s+p}\right\} = K\,e^{-pt}$ a cada termo, obtemos a equação horária exata da tensão no nó:
$$\boxed{v(t) = -5\,e^{-4000\,t} + 10\,e^{-16000\,t}\ \text{V}}$$Verificamos a consistência com as condições iniciais:
- Tensão em $t = 0$: $v(0) = -5 + 10 = 5\ \text{V} = V_0\ \checkmark$
- Taxa de variação em $t = 0$: $$\dot{v}(0) = -5 \times (-4000) + 10 \times (-16000) = 20\,000 - 160\,000 = -140\,000\ \text{V/s}$$ Via LKC: $\dot{v}(0) = -\dfrac{V_0}{RC} - \dfrac{I_0}{C} = -100\,000 - 40\,000 = -140\,000\ \text{V/s}\ \checkmark$
Interpretação do Resultado
No domínio de Laplace, os polos do circuito RLC paralelo superamortecido são reais, negativos e distintos, situados inteiramente no eixo real do plano $s$. Isso confirma que a tensão decai de forma puramente exponencial, sem qualquer componente oscilatória. A unidade dos polos é Np/s, a mesma da frequência de Neper $\alpha$.
1. Distinção Conceitual: $\alpha$ (Causa) versus Polos (Efeito)
- Frequência de Neper ($\alpha$): Propriedade global do circuito definida por $\alpha = \dfrac{1}{2RC} = 10\,000\ \text{Np/s}$. Representa a capacidade média de dissipação do resistor.
- Polos $p_1$ e $p_2$: Modos efetivos pelos quais o circuito dissipa a energia armazenada. $\alpha$ é geometricamente o ponto médio exato entre os dois polos: $$p_{1,2} = -\alpha \pm \sqrt{\alpha^2 - \omega_0^2} = -10\,000 \pm 6\,000$$ O circuito distribui a dissipação em um modo lento ($p_1 = -4\,000\ \text{Np/s}$) e um modo rápido ($p_2 = -16\,000\ \text{Np/s}$).
2. Interpretação Física: A Superposição das Exponenciais
Ao se liberar a tensão $V_0 = 5\ \text{V}$ no capacitor e a corrente $I_0 = 1\ \text{A}$ no indutor, a tensão no nó é a superposição de dois modos de decaimento independentes:
- Modo rápido ($p_2 = -16\,000\ \text{Np/s}$): A exponencial $+10\,e^{-16000t}$ decai em menos de $0{,}5\ \text{ms}$. Fisicamente, a corrente $I_0 = 1\ \text{A}$ no indutor, ao drenar carga do capacitor para o nó, suprime rapidamente o excesso de tensão e domina o comportamento imediato do circuito.
- Modo lento ($p_1 = -4\,000\ \text{Np/s}$): A exponencial $-5\,e^{-4000t}$, embora de amplitude menor, decai mais vagarosamente e determina o tempo de acomodação total. Representa a fase final em que a energia remanescente é gradualmente consumida pelo resistor.
O coeficiente negativo $A = -5$ não implica tensão negativa em $t = 0$; a interação entre os dois modos garante $v(0) = -5 + 10 = 5\ \text{V} = V_0$. A tensão decai de forma monotônica e assintoticamente para zero sem oscilar.
O Conceito de Polo Dominante
O polo dominante é $p_1 = -4\,000\ \text{Np/s}$, pois possui o menor módulo de parte real. O polo rápido ($p_2 = -16\,000\ \text{Np/s}$) torna-se praticamente desprezível após $\approx 0{,}3\ \text{ms}$; a partir daí, o circuito se comporta como um sistema de primeira ordem governado exclusivamente por $p_1$. O tempo de acomodação total é ditado por $5/|p_1| = 1{,}25\ \text{ms}$. Em outras palavras, o circuito nunca estabilizará mais rapidamente do que a sua exponencial mais lenta.
Dados do Circuito
- Resistência: $R = 2{,}5\ \Omega$
- Indutância: $L = 800\ \mu\text{H}$
- Capacitância: $C = 50\ \mu\text{F}$
- Tensão inicial: $V_0 = 3\ \text{V}$
- Corrente inicial: $I_0 = 0\ \text{A}$
Passo 1: Cálculo dos Parâmetros Fundamentais
A partir da equação característica ($s^2 + \frac{1}{RC}s + \frac{1}{LC} = 0$), identificamos os coeficientes:
- Coeficiente de $s$: $$\frac{1}{RC} = \frac{1}{2{,}5 \times 50 \times 10^{-6}} = \frac{1}{125 \times 10^{-6}} = 8\,000$$
- Termo independente: $$\frac{1}{LC} = \frac{1}{800 \times 10^{-6} \times 50 \times 10^{-6}} = \frac{1}{40 \times 10^{-9}} = 25\,000\,000$$
Convertendo para as grandezas dinâmicas universais:
- Frequência de Neper ($\alpha$): $$\alpha = \frac{1}{2RC} = \frac{1}{2 \times 2{,}5 \times 50 \times 10^{-6}} = 4\,000\ \text{Np/s}$$
- $\alpha^2$: $$\alpha^2 = (4\,000)^2 = 1{,}6 \times 10^7$$
- Frequência Angular de Ressonância ($\omega_0$): $$\omega_0 = \frac{1}{\sqrt{LC}} = \frac{1}{\sqrt{800 \times 10^{-6} \times 50 \times 10^{-6}}} = \frac{1}{\sqrt{40 \times 10^{-9}}} = 5\,000\ \text{rad/s}$$
- $\omega_0^2$: $$\omega_0^2 = (5\,000)^2 = 2{,}5 \times 10^7$$
- Coeficiente de amortecimento ($\zeta$): $$\zeta = \frac{\alpha}{\omega_0} = \frac{4\,000}{5\,000} = 0{,}8$$
Classificação do Sistema: Como $\alpha^2 < \omega_0^2$ ($1{,}6 \times 10^7 < 2{,}5 \times 10^7$) e $\zeta = 0{,}8 < 1$, o circuito é Subamortecido. O discriminante de Bhaskara é negativo, resultando em polos complexos conjugados e uma tensão oscilatória amortecida.
Passo 2: Cálculo dos Polos ($p_1, p_2$)
Com o discriminante negativo, introduzimos a frequência natural amortecida $\omega_d$:
$$\omega_d = \sqrt{\omega_0^2 - \alpha^2} = \sqrt{2{,}5 \times 10^7 - 1{,}6 \times 10^7} = \sqrt{9 \times 10^6} = 3\,000\ \text{rad/s}$$Os polos na forma complexa canônica $p_{1,2} = -\alpha \pm j\omega_d$ são:
$$p_{1,2} = -4\,000 \pm j\,3\,000$$- Polo 1: $p_1 = -4\,000 + j\,3\,000$
- Polo 2: $p_2 = -4\,000 - j\,3\,000$
Passo 3: Montagem de $V(s)$
Com $I_0 = 0$, o numerador de $V(s)$ simplifica-se:
$$V(s) = \frac{s\,V_0 - \dfrac{I_0}{C}}{s^2 + \dfrac{1}{RC}\,s + \dfrac{1}{LC}} = \frac{3s}{s^2 + 8\,000\,s + 25\,000\,000}$$Fatorando o denominador pelos polos complexos encontrados no Passo 2:
$$V(s) = \frac{3s}{(s - p_1)(s - p_2)} = \frac{3s}{(s + 4\,000 - j\,3\,000)\,(s + 4\,000 + j\,3\,000)}$$Passo 4: Expansão em Frações Parciais
Etapa 1 — Frações Parciais e Cálculo dos Resíduos ($K_1$ e $K_2$):
Expressamos $V(s)$ na forma fatorada e estabelecemos a decomposição:
$$V(s) = \frac{3s}{(s - p_1)(s - p_2)} = \frac{K_1}{s - p_1} + \frac{K_2}{s - p_2}$$Pelo método dos resíduos de Heaviside:
Cálculo de $K_1$ — avaliamos no polo $s = p_1 = -4\,000 + j\,3\,000$:
$$K_1 = \left.\frac{3s}{s - p_2}\right|_{s\,=\,p_1} = \frac{3(-4\,000 + j\,3\,000)}{(-4\,000 + j\,3\,000) - (-4\,000 - j\,3\,000)}$$ $$K_1 = \frac{-12\,000 + j\,9\,000}{j\,6\,000}$$Multiplicando numerador e denominador por $-j$ para eliminar a unidade imaginária do denominador:
$$K_1 = \frac{(-12\,000 + j\,9\,000)(-j)}{j\,6\,000\cdot(-j)} = \frac{12\,000j + 9\,000}{6\,000} = \mathbf{1{,}5 + j\,2}$$Cálculo de $K_2$: como todos os coeficientes da equação original são reais, $K_2$ é obrigatoriamente o conjugado complexo de $K_1$:
$$K_2 = \overline{K_1} = \mathbf{1{,}5 - j\,2}$$Conversão para a Forma Polar ($M e^{j\theta}$):
Módulo ($M$):
$$M = \sqrt{(1{,}5)^2 + 2^2} = \sqrt{2{,}25 + 4} = \sqrt{6{,}25} = \mathbf{2{,}5}$$Fase ($\theta$) — como a parte real e a parte imaginária de $K_1$ são ambas positivas (1.º quadrante):
$$\theta = \arctan\!\left(\frac{2}{1{,}5}\right) = \arctan\!\left(\frac{4}{3}\right) \cong \mathbf{53{,}13°}$$Portanto, os resíduos em forma polar são:
$$K_1 = 2{,}5\,e^{+j53{,}13°} \qquad K_2 = 2{,}5\,e^{-j53{,}13°}$$Etapa 2 — Montagem de $V(s)$ e Transformada Inversa:
Substituindo os resíduos polares e os polos na expansão e aplicando $\mathcal{L}^{-1}\!\left\{\dfrac{K}{s-p}\right\} = K\,e^{\,pt}$ termo a termo:
$$V(s) = \frac{2{,}5\,e^{+j53{,}13°}}{s - (-4\,000 + j\,3\,000)} + \frac{2{,}5\,e^{-j53{,}13°}}{s - (-4\,000 - j\,3\,000)}$$ $$v(t) = 2{,}5\,e^{+j53{,}13°}\cdot e^{(-4000+j3000)t} + 2{,}5\,e^{-j53{,}13°}\cdot e^{(-4000-j3000)t}$$Etapa 3 — Manipulação Algébrica e Identidade de Euler:
Separamos o decaimento real da oscilação imaginária e colocamos os termos comuns ($2{,}5$ e $e^{-4000t}$) em evidência:
$$v(t) = 2{,}5\cdot e^{-4000t}\left(e^{+j53{,}13°}\cdot e^{+j3000t} + e^{-j53{,}13°}\cdot e^{-j3000t}\right)$$Somando os expoentes de mesma base:
$$v(t) = 2{,}5\cdot e^{-4000t}\left(e^{\,j(3000t\,+\,53{,}13°)} + e^{-j(3000t\,+\,53{,}13°)}\right)$$Aplicando a Identidade de Euler $\left(e^{jx} + e^{-jx} = 2\cos x\right)$:
$$v(t) = 2{,}5\cdot e^{-4000t}\cdot 2\cos\!\left(3000t + 53{,}13°\right)$$Passo 5: Transformada Inversa e Equação de $v(t)$
Multiplicando o módulo pelo fator 2, chegamos à equação horária final da tensão no capacitor:
$$\boxed{v(t) = 5\,e^{-4000\,t}\cos(3000\,t + 53{,}13°)\ \text{V}}$$Verificamos a consistência com as condições iniciais:
- Tensão em $t = 0$: $v(0) = 5\cos(53{,}13°) = 5 \times 0{,}6 = 3\ \text{V} = V_0\ \checkmark$
- Taxa de variação em $t = 0$: via LKC, $$\dot{v}(0) = -\frac{V_0}{RC} - \frac{I_0}{C} = -\frac{3}{2{,}5 \times 50 \times 10^{-6}} - 0 = -24\,000\ \text{V/s}$$ e pela derivada de $v(t)$ em $t = 0$: confirmado $-24\,000\ \text{V/s}\ \checkmark$
Interpretação do Resultado
No domínio de Laplace, polos complexos conjugados com parte real estritamente negativa são a assinatura inequívoca do regime subamortecido. A parte real $\sigma = -\alpha = -4\,000\ \text{Np/s}$ governa o decaimento exponencial da amplitude, enquanto a parte imaginária $\omega_d = 3\,000\ \text{rad/s}$ governa a frequência de oscilação amortecida — distinguindo o comportamento oscilatório do caso superamortecido.
1. Os Três Ingredientes da Resposta Subamortecida
A equação $v(t) = 5\,e^{-4000t}\cos(3000t + 53{,}13°)$ é composta por três fatores com significados físicos distintos:
- Amplitude inicial ($5\ \text{V}$): Ligeiramente superior a $V_0 = 3\ \text{V}$. A diferença é imposta pelo ângulo de fase $\phi = 53{,}13°$: em $t = 0$, o cosseno não vale 1, mas $\cos(53{,}13°) = 0{,}6$. Assim, $v(0) = 5 \times 0{,}6 = 3\ \text{V} = V_0\ \checkmark$.
- Envoltória de decaimento ($e^{-\alpha t} = e^{-4000t}$): Controlada por $\alpha = 4\,000\ \text{Np/s}$. Delimita a amplitude máxima da oscilação ao longo do tempo. Pelo critério das cinco constantes de tempo, a tensão estabiliza-se em $\approx 5/\alpha = 1{,}25\ \text{ms}$.
- Oscilação amortecida ($\cos(\omega_d t + \phi)$): Com $\omega_d = 3\,000\ \text{rad/s}$, o período de oscilação é $T = 2\pi/3000 \approx 2{,}09\ \text{ms}$. O amortecimento $\zeta = 0{,}8$ é significativo: a tensão oscila apenas poucas vezes antes de atingir o regime estacionário.
2. A Origem da Fase $\phi = 53{,}13°$ e Verificação das Condições Iniciais
Com $I_0 = 0$, a derivada inicial é determinada exclusivamente pela tensão inicial e pelo amortecimento. Demonstra-se que:
$$\phi = \arctan\!\left(\frac{\alpha}{\omega_d}\right) = \arctan\!\left(\frac{4\,000}{3\,000}\right) = \arctan\!\left(\frac{4}{3}\right) \approx 53{,}13°$$O ângulo é, portanto, uma medida de quão dominante é o amortecimento frente à oscilação: quanto maior $\alpha/\omega_d$, mais a fase se afasta de zero e mais a resposta inicial se distancia de um cosseno puro. Com $\zeta = 0{,}8$, o ângulo de fase é expressivo, indicando um sistema com amortecimento considerável.
Tempo de Acomodação e Frequências: $\omega_0$ versus $\omega_d$
A frequência de oscilação real do circuito é $\omega_d = 3\,000\ \text{rad/s}$, que é inferior à frequência natural $\omega_0 = 5\,000\ \text{rad/s}$. A relação entre elas é:
$$\omega_d = \omega_0\sqrt{1 - \zeta^2} = 5\,000\sqrt{1 - 0{,}64} = 5\,000 \times 0{,}6 = 3\,000\ \text{rad/s}$$O amortecimento reduz a frequência de oscilação em $40\%$ em relação ao ideal. Como ambos os polos partilham a mesma parte real $\sigma = -\alpha$, não existe um polo dominante no sentido estrito — o tempo de acomodação é ditado diretamente por $\alpha = 4\,000\ \text{Np/s}$.
Dados do Circuito
- Resistência: $R = 5\ \Omega$
- Indutância: $L = 1\ \text{mH}$
- Capacitância: $C = 10\ \mu\text{F}$
- Tensão inicial: $V_0 = 4\ \text{V}$
- Corrente inicial: $I_0 = 0\ \text{A}$
Passo 1: Cálculo dos Parâmetros Fundamentais
A partir da equação característica do circuito RLC paralelo ($s^2 + \frac{1}{RC}s + \frac{1}{LC} = 0$), identificamos os coeficientes:
- Coeficiente de $s$: $$\frac{1}{RC} = \frac{1}{5 \times 10 \times 10^{-6}} = \frac{1}{50 \times 10^{-6}} = 20\,000$$
- Termo independente: $$\frac{1}{LC} = \frac{1}{10^{-3} \times 10 \times 10^{-6}} = \frac{1}{10^{-8}} = 10^8$$
Convertendo para as grandezas dinâmicas universais:
- Frequência de Neper ($\alpha$): $$\alpha = \frac{1}{2RC} = \frac{1}{2 \times 5 \times 10 \times 10^{-6}} = \frac{1}{10^{-4}} = 10\,000\ \text{Np/s}$$
- $\alpha^2$: $$\alpha^2 = (10\,000)^2 = 10^8$$
- Frequência Angular de Ressonância ($\omega_0$): $$\omega_0 = \frac{1}{\sqrt{LC}} = \frac{1}{\sqrt{10^{-3} \times 10 \times 10^{-6}}} = \frac{1}{\sqrt{10^{-8}}} = 10\,000\ \text{rad/s}$$
- $\omega_0^2$: $$\omega_0^2 = (10\,000)^2 = 10^8$$
- Coeficiente de amortecimento ($\zeta$): $$\zeta = \frac{\alpha}{\omega_0} = \frac{10\,000}{10\,000} = 1$$
Classificação do Sistema: Como $\alpha^2 = \omega_0^2$ ($10^8 = 10^8$) e $\zeta = 1$, o circuito é Criticamente Amortecido. Este é o ponto de operação limiar: o resistor dissipa energia exatamente na taxa necessária para suprimir toda oscilação, garantindo o retorno mais rápido possível à tensão nula sem ultrapassagem.
Passo 2: Polo Duplo ($p$)
Aplicando a fórmula $p_{1,2} = -\alpha \pm \sqrt{\alpha^2 - \omega_0^2}$, o discriminante é exatamente nulo:
$$p_{1,2} = -10\,000 \pm \sqrt{10^8 - 10^8} = -10\,000 \pm 0$$Resultado: polo duplo real em:
$$p = -10\,000\ \text{Np/s}$$Passo 3: Montagem de $V(s)$
A expressão geral deduzida anteriormente é:
$$V(s) = \frac{s\,V_0 - \dfrac{I_0}{C}}{s^2 + \dfrac{1}{RC}\,s + \dfrac{1}{LC}}$$Com $I_0 = 0$, o numerador simplifica-se a $s\,V_0$. Substituindo $V_0 = 4$ e os coeficientes encontrados:
$$V(s) = \frac{4s}{s^2 + 20\,000\,s + 10^8}$$Fatorando o denominador pelo polo duplo $(s - p)^2 = (s + 10\,000)^2$:
$$V(s) = \frac{4s}{(s + 10\,000)^2}$$Passo 4: Expansão em Frações Parciais
Para polo duplo em $p = -10\,000$, a decomposição em frações parciais assume a forma:
$$V(s) = \frac{4s}{(s+10\,000)^2} = \frac{A}{s+10\,000} + \frac{B}{(s+10\,000)^2}$$Cálculo de $B$ — resíduo de ordem 2. Multiplicamos por $(s+10\,000)^2$ e avaliamos em $s = -10\,000$:
$$B = \left.\left[(s+10\,000)^2 \cdot V(s)\right]\right|_{s=-10\,000} = \left.4s\right|_{s=-10\,000} = 4 \times (-10\,000) = -40\,000$$Cálculo de $A$ — resíduo de ordem 1. Derivamos o numerador limpo e avaliamos em $s = -10\,000$:
$$A = \left.\frac{d}{ds}\left[(s+10\,000)^2 \cdot V(s)\right]\right|_{s=-10\,000} = \left.\frac{d}{ds}(4s)\right|_{s=-10\,000} = 4$$Substituindo $A = 4$ e $B = -40\,000$:
$$V(s) = \frac{4}{s+10\,000} - \frac{40\,000}{(s+10\,000)^2}$$Passo 5: Transformada Inversa e Equação de $v(t)$
Aplicamos a transformada inversa termo a termo, utilizando os pares tabelados:
- $\mathcal{L}^{-1}\!\left\{\dfrac{K}{s+a}\right\} = K\,e^{-at}$
- $\mathcal{L}^{-1}\!\left\{\dfrac{K}{(s+a)^2}\right\} = K\,t\,e^{-at}$
Aplicando a cada parcela:
$$\mathcal{L}^{-1}\!\left\{\frac{4}{s+10\,000}\right\} = 4\,e^{-10000\,t}$$ $$\mathcal{L}^{-1}\!\left\{\frac{-40\,000}{(s+10\,000)^2}\right\} = -40\,000\,t\,e^{-10000\,t}$$Somando as contribuições e colocando a exponencial em evidência:
$$\boxed{v(t) = (4 - 40\,000\,t)\,e^{-10000\,t}\ \text{V}}$$Verificamos a consistência com as condições iniciais:
- Tensão em $t = 0$: $v(0) = (4 - 0)\,e^0 = 4\ \text{V} = V_0\ \checkmark$
- Taxa de variação em $t = 0$: derivando $v(t) = (4 - 40\,000\,t)\,e^{-10000t}$: $$\dot{v}(t) = -40\,000\,e^{-10000t} + (4 - 40\,000\,t)\,(-10\,000)\,e^{-10000t}$$ $$\dot{v}(0) = -40\,000 - 40\,000 = -80\,000\ \text{V/s}$$ Via LKC: $\dot{v}(0) = -\dfrac{V_0}{RC} - \dfrac{I_0}{C} = -\dfrac{4}{5 \times 10 \times 10^{-6}} - 0 = -80\,000\ \text{V/s}\ \checkmark$
Interpretação do Resultado
No domínio de Laplace, o regime criticamente amortecido corresponde à coalescência dos dois polos em um único polo duplo real $p = -\alpha$. O discriminante nulo é a fronteira matemática que separa polos reais distintos (superamortecido) de polos complexos conjugados (subamortecido). A resposta no tempo combina uma exponencial pura com uma exponencial multiplicada por $t$ — estrutura exclusiva deste regime.
1. Verificação das Condições Iniciais e Estrutura da Resposta
A equação $v(t) = (4 - 40\,000\,t)\,e^{-10000t}$ é a superposição de dois modos distintos, ambos governados pelo mesmo polo $p = -10\,000\ \text{Np/s}$:
- Modo constante — $4\,e^{-10000t}$: Proporcional à tensão inicial $V_0$. Decai puramente de forma exponencial, representando a "memória" da carga armazenada no capacitor em $t = 0$.
- Modo rampa amortecida — $-40\,000\,t\,e^{-10000t}$: Exclusivo do regime criticamente amortecido. O fator $t$ faz com que esta componente cresça inicialmente antes de ser dominada pela exponencial. Seu pico ocorre em $t = 1/\alpha = 0{,}1\ \text{ms}$, após o que decresce rapidamente para zero.
Como $I_0 = 0$, a tensão $v(t)$ inicia em $V_0 = 4\ \text{V}$, decresce monotonicamente e converge para zero sem nenhuma oscilação.
2. O Criticamente Amortecido como Fronteira Ótima
O regime criticamente amortecido representa o ponto ótimo de projeto para circuitos que devem dissipar toda a energia armazenada sem oscilar no menor tempo possível. Neste exemplo, para os mesmos valores de $L$ e $C$, qualquer resistência $R \neq 5\ \Omega$ produz uma resposta inferior:
| Regime | Condição | Forma de $v(t)$ | Tempo de acomodação |
|---|---|---|---|
| Superamortecido | $R < R_{cr} = 5\ \Omega$ | $A\,e^{p_1 t} + B\,e^{p_2 t}$ | $> 5/|p_1|$ (polo dominante mais lento) |
| Criticamente amortecido | $R = R_{cr} = 5\ \Omega$ | $(A + Bt)\,e^{-\alpha t}$ | $\approx 5/\alpha = 0{,}5\ \text{ms}$ (mínimo sem oscilação) |
| Subamortecido | $R > R_{cr} = 5\ \Omega$ | $M\,e^{-\alpha t}\cos(\omega_d t + \phi)$ | $\approx 5/\alpha$ (mas com ultrapassagem) |
Note que, no circuito RLC paralelo, aumentar $R$ reduz $\alpha = 1/(2RC)$, portanto diminui o amortecimento — comportamento oposto ao do sistema mecânico, onde aumentar $c$ aumenta $\alpha$. O resistor crítico para este circuito é $R_{cr} = \frac{1}{2}\sqrt{L/C} = \frac{1}{2}\sqrt{10^{-3}/10^{-5}} = \frac{1}{2} \times 10 = 5\ \Omega$.
Ajuste os sliders e clique em "Atualizar" para calcular.
Analogia Mecânico-Elétrica
O sistema massa-mola-amortecedor e o circuito RLC paralelo, embora pertencentes a domínios físicos distintos, são regidos por equações diferenciais de segunda ordem estruturalmente idênticas. Essa correspondência — denominada analogia força–corrente — permite que toda a metodologia desenvolvida para um sistema (Transformada de Laplace, cálculo de polos, classificação de regimes) se aplique diretamente ao outro, substituindo apenas os parâmetros físicos.
1. Equações Diferenciais Governantes
Sistema Mecânico
$$m\ddot{x}(t) + c\,\dot{x}(t) + k\,x(t) = 0$$- $x(t)$: deslocamento [m]
- $m$: massa [kg]
- $c$: amortecimento viscoso [N·s/m]
- $k$: constante da mola [N/m]
Circuito RLC Paralelo
$$C\ddot{v}(t) + \frac{1}{R}\,\dot{v}(t) + \frac{1}{L}\,v(t) = 0$$- $v(t)$: tensão no nó [V]
- $C$: capacitância [F]
- $R$: resistência [$\Omega$]
- $L$: indutância [H]
Dividindo cada equação pelo coeficiente do termo de segunda ordem ($m$ e $C$, respectivamente) e identificando os parâmetros dinâmicos, ambas se reduzem à mesma forma canônica normalizada, válida para qualquer sistema de segunda ordem:
$$\ddot{y}(t) + 2\alpha\,\dot{y}(t) + \omega_0^2\,y(t) = 0$$onde $y(t)$ é a variável de estado ($x$ ou $v$), $\alpha$ é a frequência de Neper [Np/s] e $\omega_0$ é a frequência angular natural [rad/s].
2. Tabela de Analogia dos Parâmetros
A correspondência é estabelecida comparando os coeficientes das EDOs completas. O elemento análogo ao amortecimento mecânico $c$ é a condutância $G = 1/R$ — não a resistência diretamente:
| Grandeza | Sistema Mecânico | Circuito RLC Paralelo |
|---|---|---|
| Variável de estado | Deslocamento $x(t)$ [m] | Tensão $v(t)$ [V] |
| EDO completa | $m\ddot{x} + c\dot{x} + kx = 0$ | $C\ddot{v} + \dfrac{1}{R}\dot{v} + \dfrac{1}{L}v = 0$ |
| Elemento de "inércia" | Massa $m$ [kg] | Capacitância $C$ [F] |
| Elemento de "amortecimento" | Coef. viscoso $c$ [N·s/m] | Condutância $G = 1/R$ [S = A/V] |
| Elemento de "rigidez" | Constante da mola $k$ [N/m] | Elastância $1/L$ [H$^{-1}$] |
| C.I. de "posição" | $x(0) = x_0$ | $v(0) = V_0$ |
| C.I. de "velocidade" | $\dot{x}(0) = v_0$ | $\dot{v}(0) = -\dfrac{V_0}{RC} - \dfrac{I_0}{C}$ |
Atenção — sentido inverso no RLC paralelo: No sistema mecânico, aumentar $c$ aumenta o amortecimento ($\alpha = c/2m$ cresce). No circuito RLC paralelo, aumentar $R$ reduz o amortecimento ($\alpha = 1/(2RC)$ decresce), pois um resistor maior dissipa menos corrente para a mesma tensão. O parâmetro eletricamente análogo a $c$ é a condutância $G = 1/R$: de fato $\alpha = G/(2C)$, e aumentar $G$ aumenta $\alpha$.
3. Parâmetros Universais: $\alpha$, $\omega_0$ e $\zeta$
Ao normalizar a EDO pelo coeficiente de inércia, emergem três parâmetros dinâmicos que descrevem completamente o comportamento do sistema, independentemente do domínio físico:
| Parâmetro | Sistema Mecânico | Circuito RLC Paralelo | Significado |
|---|---|---|---|
| Freq. de Neper $\alpha$ [Np/s] | $\dfrac{c}{2m}$ | $\dfrac{1}{2RC}$ | Taxa de decaimento exponencial |
| Freq. natural $\omega_0$ [rad/s] | $\sqrt{\dfrac{k}{m}}$ | $\dfrac{1}{\sqrt{LC}}$ | Frequência de oscilação sem amortecimento |
| Coef. amortecimento $\zeta$ | $\dfrac{c}{2\sqrt{mk}}$ | $\dfrac{1}{2R}\sqrt{\dfrac{L}{C}}$ | $\alpha/\omega_0$; classifica o regime dinâmico |
A identidade universal que liga os três parâmetros é:
$$\zeta = \frac{\alpha}{\omega_0}$$Amortecimento Crítico e Valores Limiares
O regime criticamente amortecido ocorre quando $\zeta = 1 \Leftrightarrow \alpha = \omega_0$, definindo o valor limiar do elemento dissipativo em cada domínio:
Sistema Mecânico
$$c_{cr} = 2\sqrt{mk} = 2m\omega_0$$$c > c_{cr}$ → superamortecido | $c < c_{cr}$ → subamortecido
Circuito RLC Paralelo
$$R_{cr} = \frac{1}{2}\sqrt{\frac{L}{C}}$$$R < R_{cr}$ → superamortecido | $R > R_{cr}$ → subamortecido
Note a inversão do sentido: no sistema mecânico um amortecedor mais forte ($c$ maior) leva ao regime superamortecido; no circuito RLC paralelo é a menor resistência (maior condutância $G$) que produz maior amortecimento e regime superamortecido.
4. Transformadas de Laplace e Equação Característica Universal
Aplicando a Transformada de Laplace com as respectivas condições iniciais, ambos os sistemas produzem funções racionais em $s$ com denominadores idênticos:
Sistema Mecânico — $X(s)$
$$X(s) = \frac{x_0(s + 2\alpha) + v_0}{s^2 + 2\alpha\,s + \omega_0^2}$$C.I. independentes: $x_0$ e $v_0 = \dot{x}(0)$
Circuito RLC Paralelo — $V(s)$
$$V(s) = \frac{V_0\,s - \dfrac{I_0}{C}}{s^2 + 2\alpha\,s + \omega_0^2}$$C.I. independentes: $V_0$ e $I_0 = i_L(0)$
Os denominadores são idênticos. A equação característica universal e os polos têm, portanto, a mesma forma para ambos os sistemas:
$$s^2 + 2\alpha\,s + \omega_0^2 = 0 \quad \Longrightarrow \quad p_{1,2} = -\alpha \pm \sqrt{\alpha^2 - \omega_0^2}$$E a classificação do regime dinâmico é idêntica para os dois sistemas:
| Condição | Natureza dos Polos ($p_1$, $p_2$) | Regime | Forma de $y(t)$ |
|---|---|---|---|
| $\alpha^2 > \omega_0^2$ ($\zeta > 1$) | Reais e distintos | Superamortecido | $A\,e^{p_1 t} + B\,e^{p_2 t}$ |
| $\alpha^2 = \omega_0^2$ ($\zeta = 1$) | Real duplo | Criticamente amortecido | $(A + Bt)\,e^{-\alpha t}$ |
| $\alpha^2 < \omega_0^2$ ($\zeta < 1$) | Complexos conjugados | Subamortecido | $M\,e^{-\alpha t}\cos(\omega_d t + \phi)$ |
com $\omega_d = \sqrt{\omega_0^2 - \alpha^2}$ sendo a frequência natural amortecida [rad/s], exclusiva do regime subamortecido ($\omega_d < \omega_0$).